We opened our Robotics Lab to the students of the Robotics for e-health class. They got to know our robots up close and played with them to learn more about what they can do for people's health.
Experiment 1 (with a Comau SmartSix)
Despite his age and industrial design, MarComau can work with a human companion, estimate their intentions of motion and provide assistive forces to aid them in moving heavy and bulky objects around, reducing fatigue and possibilities of injuries. Other collaborative and rehabilitation robots, including exoskeletons, addressed in the course, are based on similar principles of assistance.
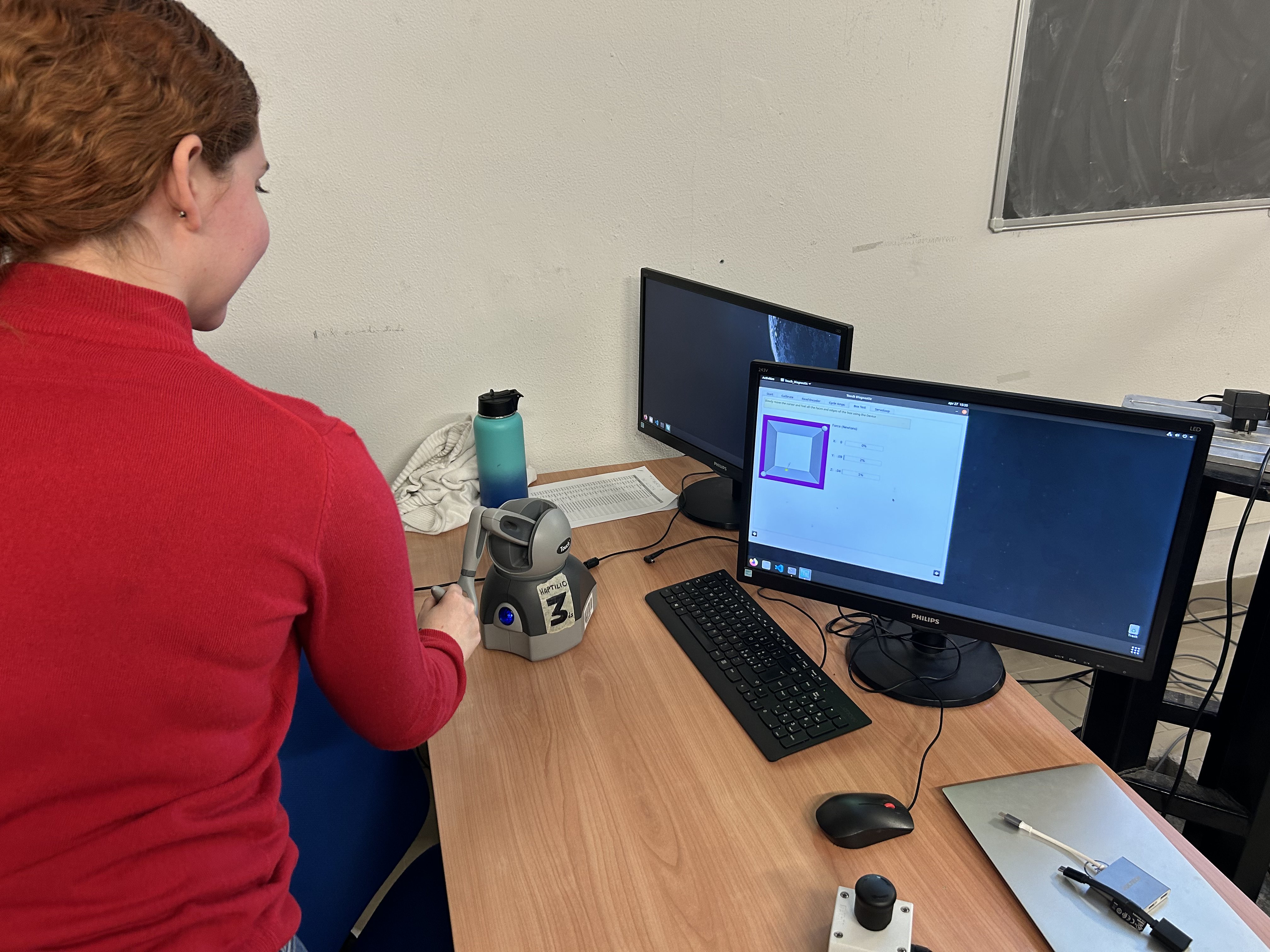
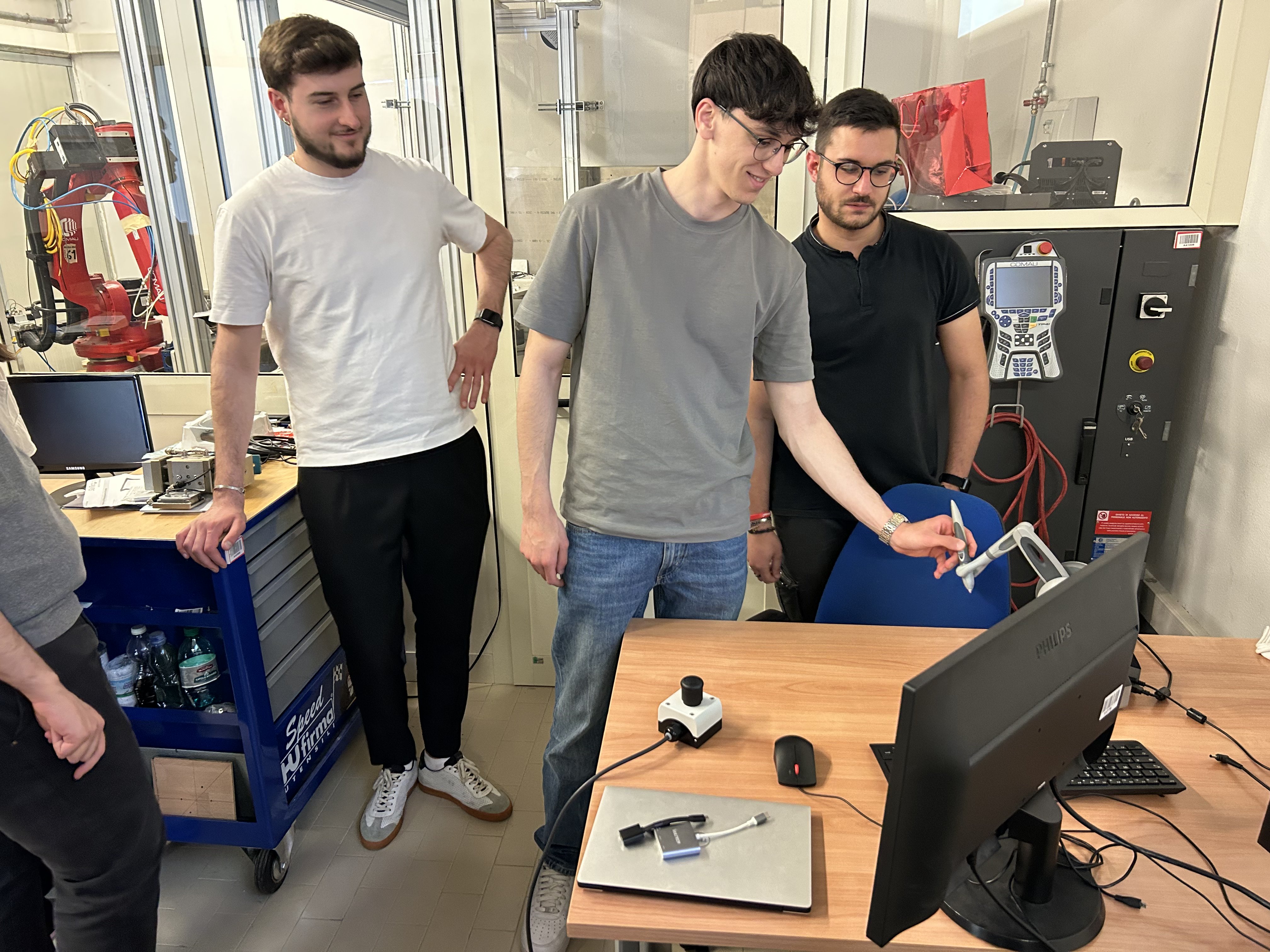
Experiment 2 (with a 3D Systems Touch haptic device)
Dragged from his stylus by a human operator, Haptilio can render real forces based on virtual constraints, commonly known as virtual fixtures. This principle is adopted by surgical robots to prevent accidents during surgical operations or to guide the surgeon's hand to increase accuracy.
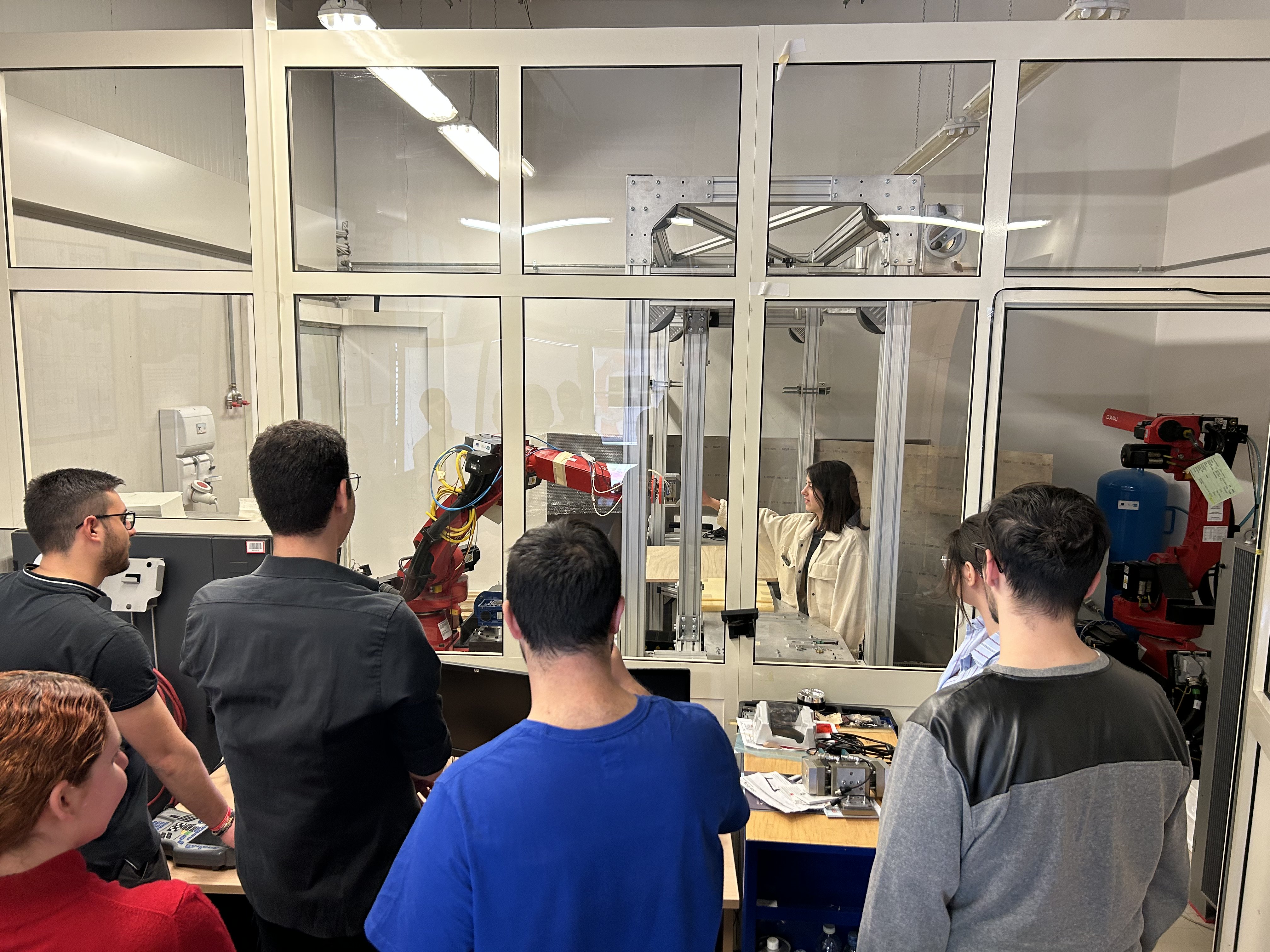
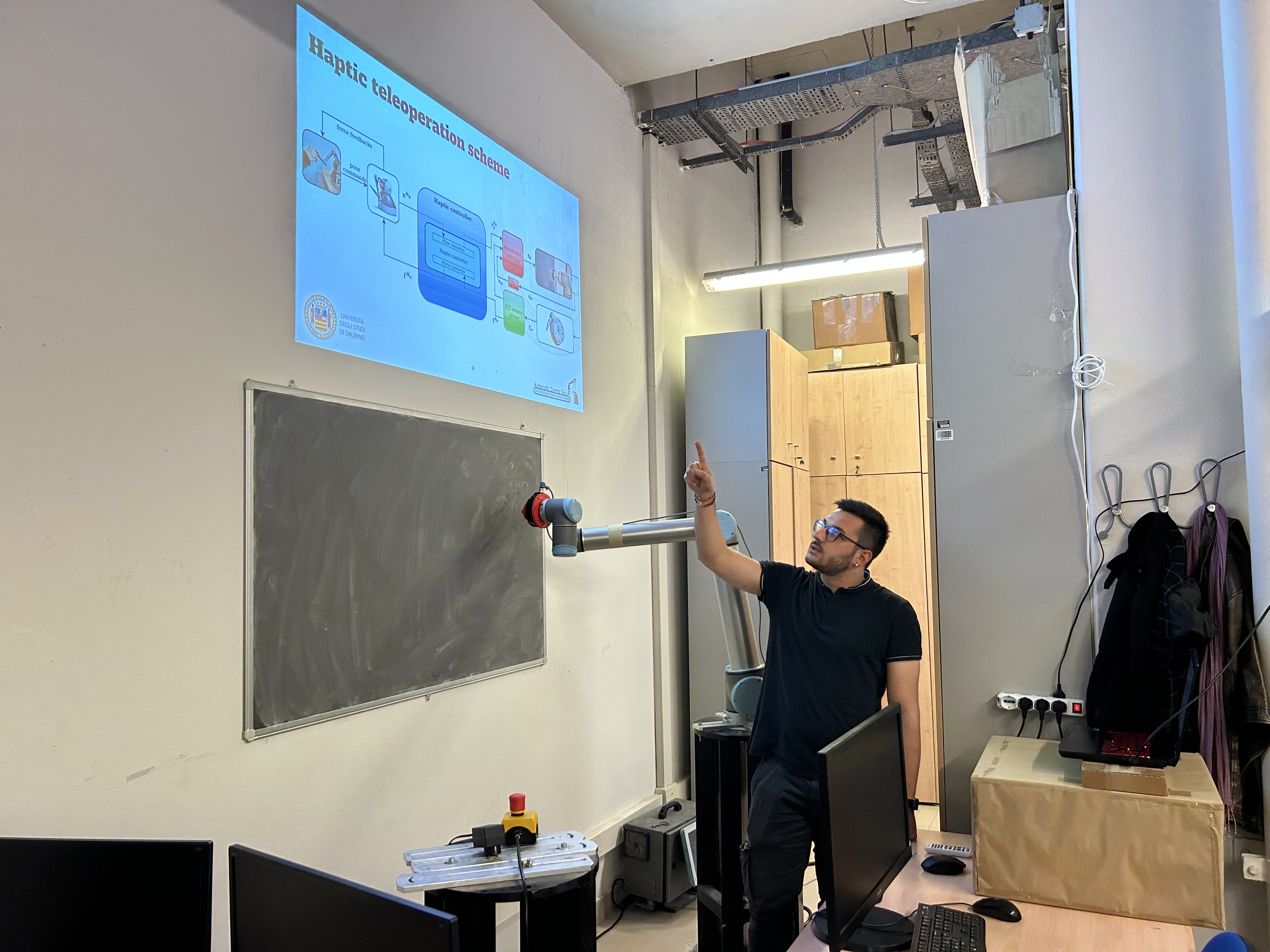
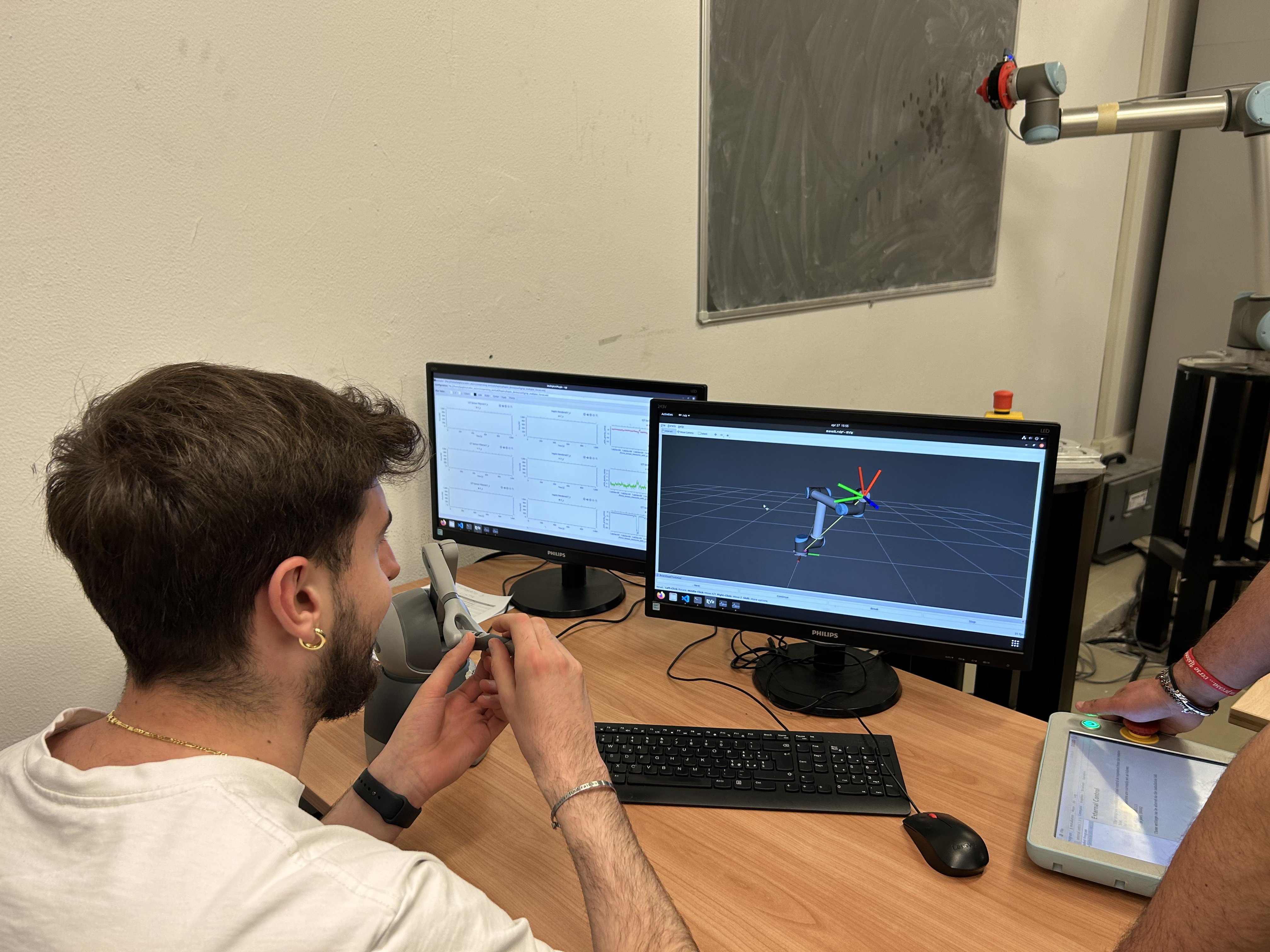
Experiment 3 (with a 3D Systems Touch haptic device and a Universal Robots UR10)
Haptilio can generate motion commands for other robots, including Arm-ando, our blackboard writing robot. Writing simulates a precision operation, just like cutting or suturing in surgery. The students were challenged to write their first name initial on the blackboard through the two robots. Real-world forces felt by Arm-ando were rendered by Haptilio to increase the operator awareness about real physical constraints in the environment. These technologies are expected to improve surgical/dental telerobotics, as well as robotic teleassistance of impaired people.
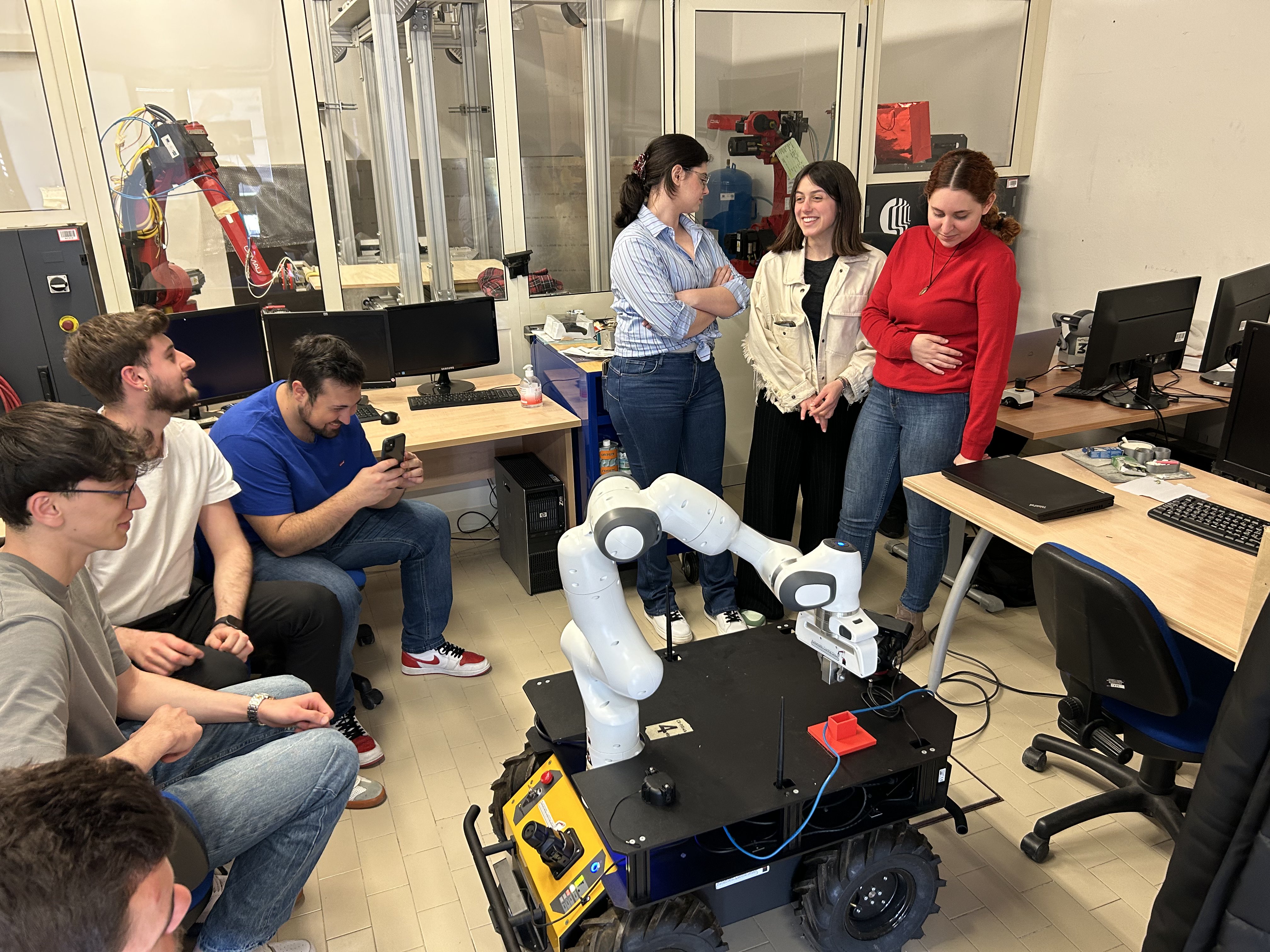
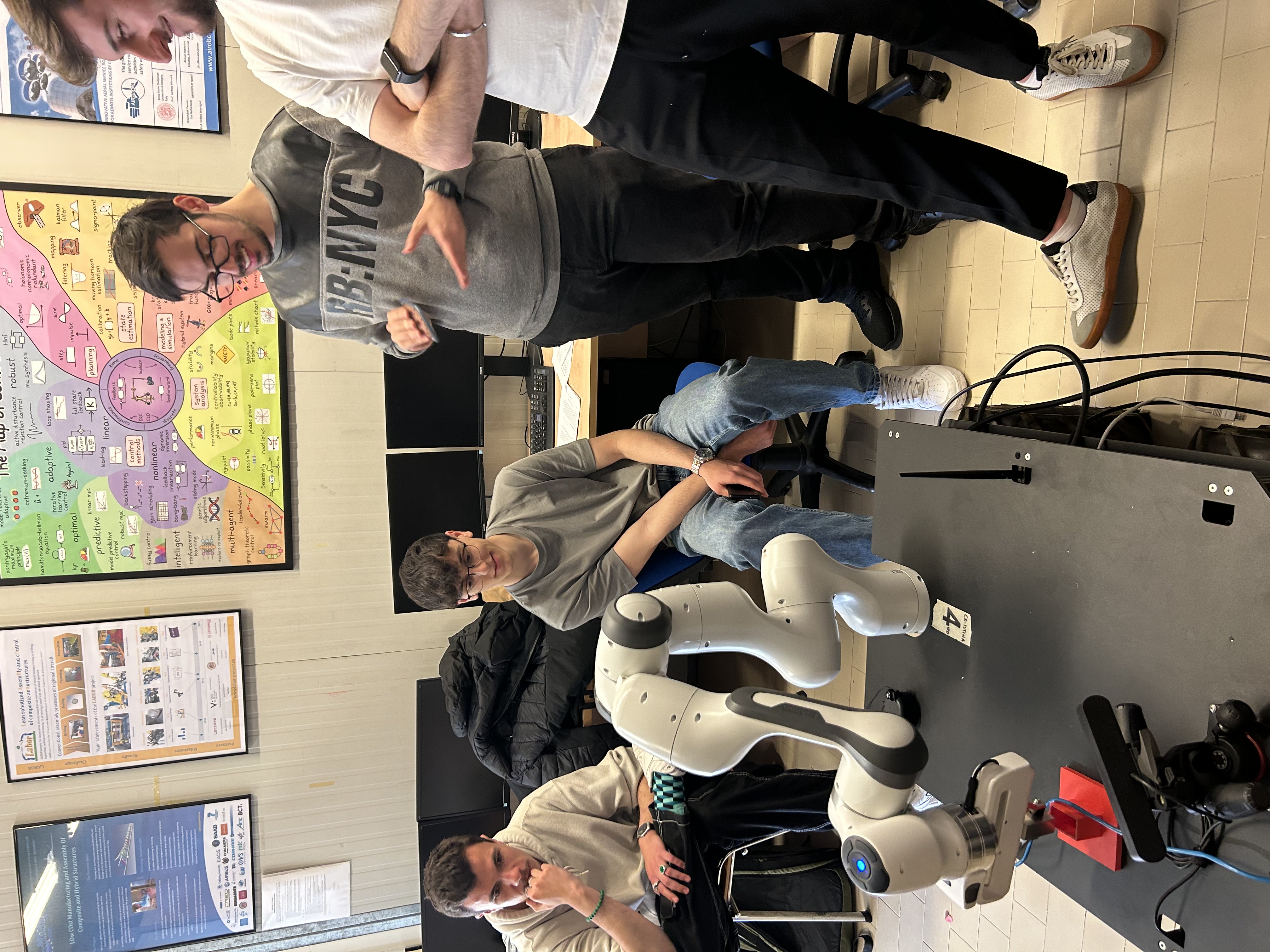
Experiment 4 (with a 3D Systems Touch haptic device, a Franka Emika Panda and a Clearpath Robotics Husky)
With a similar setup, but with a different goal, students were asked to perform a peg-in-hole experiment. In this case, the commands generated by Haptilio were addressed to Frankino, whose goal, under the human guidance, was to insert a metal cube inside a socket on CRistina's top plate. With respect to Experiment 3, the task was even more challenging because the robot was not in the view of the operator, who could only rely on video streams from the field to decide what to do. This setup simulates the typical telesurgery scenarios where the surgeon and the operating robot are not colocated.
Thanks to all the students who took part in the experiments and gave their consent to publish these nice pictures of surprise, concentration, joy and fun!













Published on April 28, 2023. 14:50 Italian time. Fisciano, IT.